

















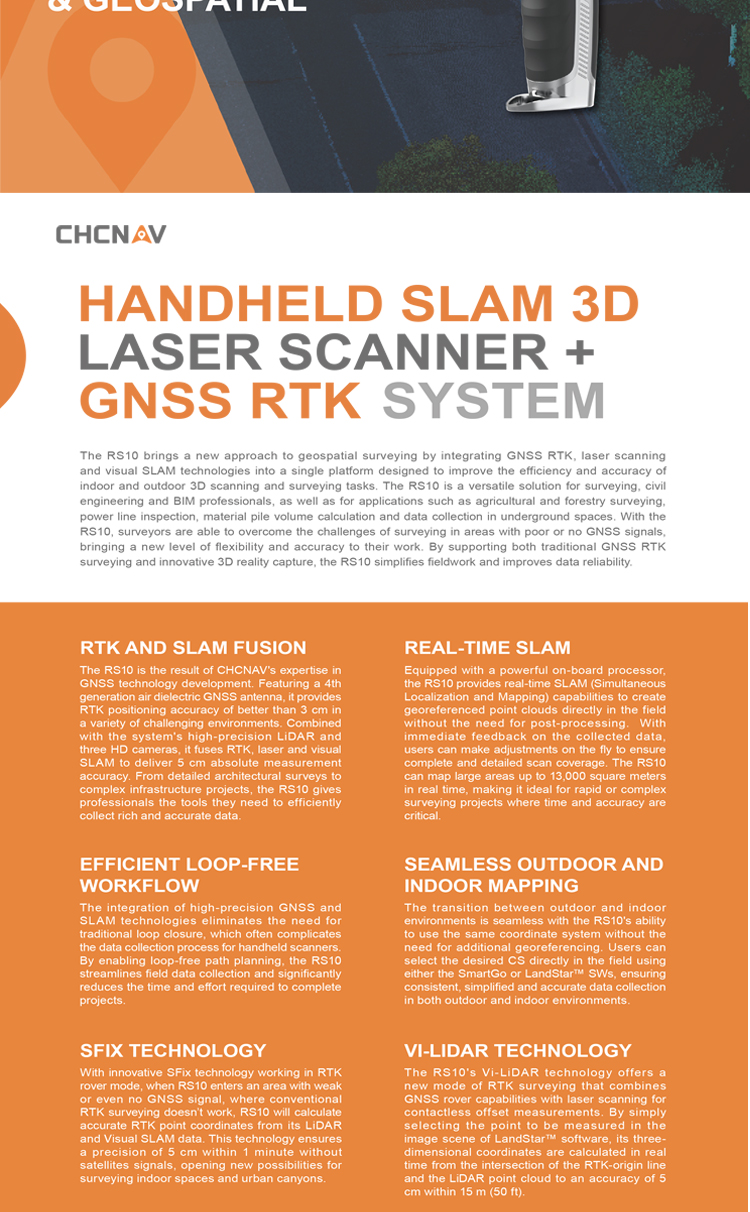
CHC RS10 Handheld Slam Laser AR visual Scanning Surveying with High Accuracy and Good Price GNSS RTK System Instrument
Product Features
High precision measurement:
The RS10 uses a 3 high-definition camera that combines high-precision lidar, RTK, laser and visual SLAM to provide a measurement accuracy of 5cm.
The integrated full real-time kinematic (RTK)GNSS receiver further improves measurement accuracy and reliability.
Real-time SLAM technology:
Using real-time SLAM technology, a cloud of real-time geographical reference points can be generated in the field, and users can receive immediate feedback to adjust during scanning.
No traditional closed loop is required, simplifying the data collection process and significantly reducing the time spent in the field.
Versatility:
It is suitable for 3D geospatial data capture in outdoor and indoor environments, and meets the requirements of various operation scenarios such as land mapping, smart city construction, BIM construction, agriculture and forestry measurement, power detection, heap measurement, underground space data collection, etc.
Data processing and analysis can be performed in the field through a powerful on-board processor.
User-friendliness:
The design is compact and light, easy to carry and operate.
Provides an intuitive user interface and an easy-to-understand operating guide.
Battery life:
Equipped with a hot-swappable battery to ensure long-term work without interruption.
Technical Specifications
Measurement accuracy: 5cm
Sensors: HD camera, lidar, RTK, laser and visual SLAM
GNSS receiver: Full real-time kinematics (RTK)GNSS receiver
Working environment: outdoor and indoor
Battery: Hot-swappable battery
Application Scenarios
Land mapping: used for topographic mapping, land resources survey, etc.
Smart city construction: providing high-precision data support for urban planning, traffic management, environmental monitoring, etc.
BIM construction: aided building design, construction simulation and schedule management.
Agro-forestry measurement: used for farmland planning, forestry resource investigation, etc.
Power detection: accurate measurement and monitoring of power facilities.
Stack measurement: used for volume measurement and monitoring of storage yard and material yard.
Underground space data acquisition: provide data support for underground projects such as subways and tunnels.
detailed parameters
1. basic performance parameters
Absolute accuracy: less than 5cm (obtained by testing under the standard scene of China Test under the environment of 25 ℃ and no occlusion around, some scenes will have accuracy deviation)
Relative accuracy: less than 1cm (tested under the same conditions)
Power supply mode: lithium battery (support work to replace the battery) and external power supply
Battery capacity: 24.48wh
Single battery working time: 1 hour
Power consumption: less than 30W
Waterproof and dustproof grade: IP64
Storage capacity: 512G
Working temperature:-20~50 ℃
2. scanning and measurement parameters
Field of view: 360 ° × 270 ° (lidar),210 ° × 170 ° (camera)
Weight: 1.9kg (including RTK and battery)
Laser:
Laser safety level: Class1
Ranging: 0.05~120 meters
Point frequency: 320000 points per second
Number of laser channels: 16
Point cloud thickness: 2cm
Number of echoes: 2
Band: 905nm
RTK measurement satellite system: support GPS, GLONASS, Galileo, BeiDou, QZSS, NavIC/IRNSS and other satellite systems
Static accuracy:
Plane accuracy: ±(2.5mm 0.5 × 10-6xD)mm
Elevation accuracy: ±(5mm 0.5 × 10-6xD)mm
RTK accuracy:
Plane accuracy: ±(8mm 1 × 10-6xD)mm
Elevation accuracy: ±(15mm 1 × 10-6xD)mm
Number of channels: 1408
Non-contact measurement: support
IMU output frequency: 200Hz
Number of cameras: 3
Resolution: 15 million pixels (5 million x 3)
Sensor size: 2592(H)× 1944(V)
3. advanced features
Loop-free acquisition: Support
Real-time accuracy assessment: support
Post-processing position accuracy: level 0.01 meters, elevation 0.02 meters
Postprocessing attitude accuracy: poll/pitch 0.005 °,Heading 0.01 °
Embedded high-performance processor: can realize uninterrupted real-time SLAM solution in 13000 square meters
Self-developed SQC precision self-coupling algorithm: real-time calculation of SLAM point cloud precision, and through the green, yellow and red color point cloud precision warning.
SFix technology: normal operation can also be carried out in areas without GNSS signals or weak GNSS signals. Laser ranging information and SLAM angle constraint information help to calculate the coordinates of RTK's current measuring point.
Vi-LiDAR non-contact measurement: trinocular camera captures scene images, RTK and SLAM depth fusion, photo selection, real-time 3D coordinate calculation
4. other parameters
Compatibility: It is compatible with regular RTK mobile station functions, supports CORS, SWAS and other methods for fixing, and can also perform radio station 1 1 operation by selecting external radio stations.
Acquisition speed: the standard acquisition speed is 3~5km/h, ensuring that the point density is about 10,000 points/m2; The maximum acquisition speed can reach 20 km/h
In summary, the RS10 has the characteristics of high precision, high efficiency, versatility and user-friendliness, and is suitable for a variety of surveying and mapping scenarios and needs.
Logistics information



Logistics information
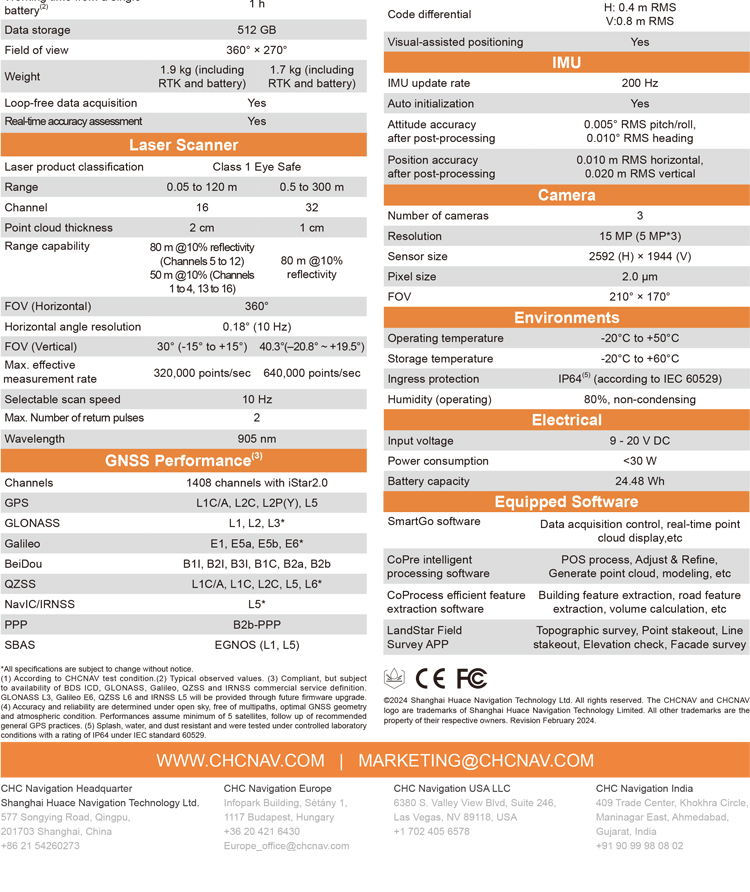
technical parameter
| General System Performance | Absolute accuracy | H: < 5 cm RMS(1) V: < 5 cm RMS(1) |
| Relative accuracy | <1 cm | |
| Power supply mode | Lithium battery, supports hot-swapping and portable charger | |
| Working time from a single battery(2) | 1h | |
| Data storage | 512 GB | |
| Field of view | 360° × 270° | |
| Weight | 1.9 kg (including RTK and battery) 1.7 kg (including RTK and battery) | |
| Loop-free data acquisition | Yes | |
| Real-time accuracy assessment | Yes | |
| Laser Scanner | Laser product classification | Class 1 Eye Safe |
| Channel | 16 32(32-lines) | |
| Point cloud thickness | 2 cm 1 cm(32-lines) | |
| Range capability | 80 m @10% reflectivity (Channels 5 to 12) 50 m @10% (Channels 1 to 4, 13 to 16) 80 m @10% reflectivity | |
| FOV (Horizontal) | 360° | |
| Horizontal angle resolution | 0.18° (10 Hz) | |
| FOV (Vertical) | 30° (-15° to +15°) 40.3°(–20.8° ~ +19.5°) | |
| Max. effective measurement rate | 320,000 points/sec 640,000 points/sec | |
| Selectable scan speed | 10 Hz | |
| Max. Number of return pulses | 22 | |
| Wavelength | 905 nm | |
| GNSS Performance(3) | Channels | 1408 channels with iStar2.0 |
| GPS | L1C/A, L2C, L2P(Y), L5 | |
| GLONASS | L1, L2, L3* | |
| Galileo | E1, E5a, E5b, E6* | |
| BeiDou | B1I, B2I, B3I, B1C, B2a, B2b | |
| QZSS | L1C/A, L1C, L2C, L5, L6* | |
| NavIC/IRNSS | L5* | |
| PPP | B2b-PPP | |
| SBAS | EGNOS (L1, L5) | |
| GNSS Accuracies | Real time kinematic (RTK)(4) | H: 8 mm + 1 ppm RMS V: 15 mm + 1 ppm RMS Initialization time: <10 s Initialization reliability: >99.9% |
| Post-processing kinematic (PPK) | H: 3 mm + 1 ppm RMS V: 5 mm + 1 ppm RMS | |
| PPP | H: 10 cm V: 20 cm |